Explore our archive below








FC Online 24
Electronic Arts




Nothing Works
Declan Mckenna




Check In On Your Friends
Seize the Awkward

Creo 2
Specialized

Loki for The New Samsung Galaxy S23 Ultra
Samsung and Disney

Faith's Flowers
Amazon Business

Esto es Volar
Aeromexico



Roubaix SL8
Specialized

Driving While Black
Driving While Black




HEADSPACE
Benjamin Earl Turner





Tarmac SL8
Specialized








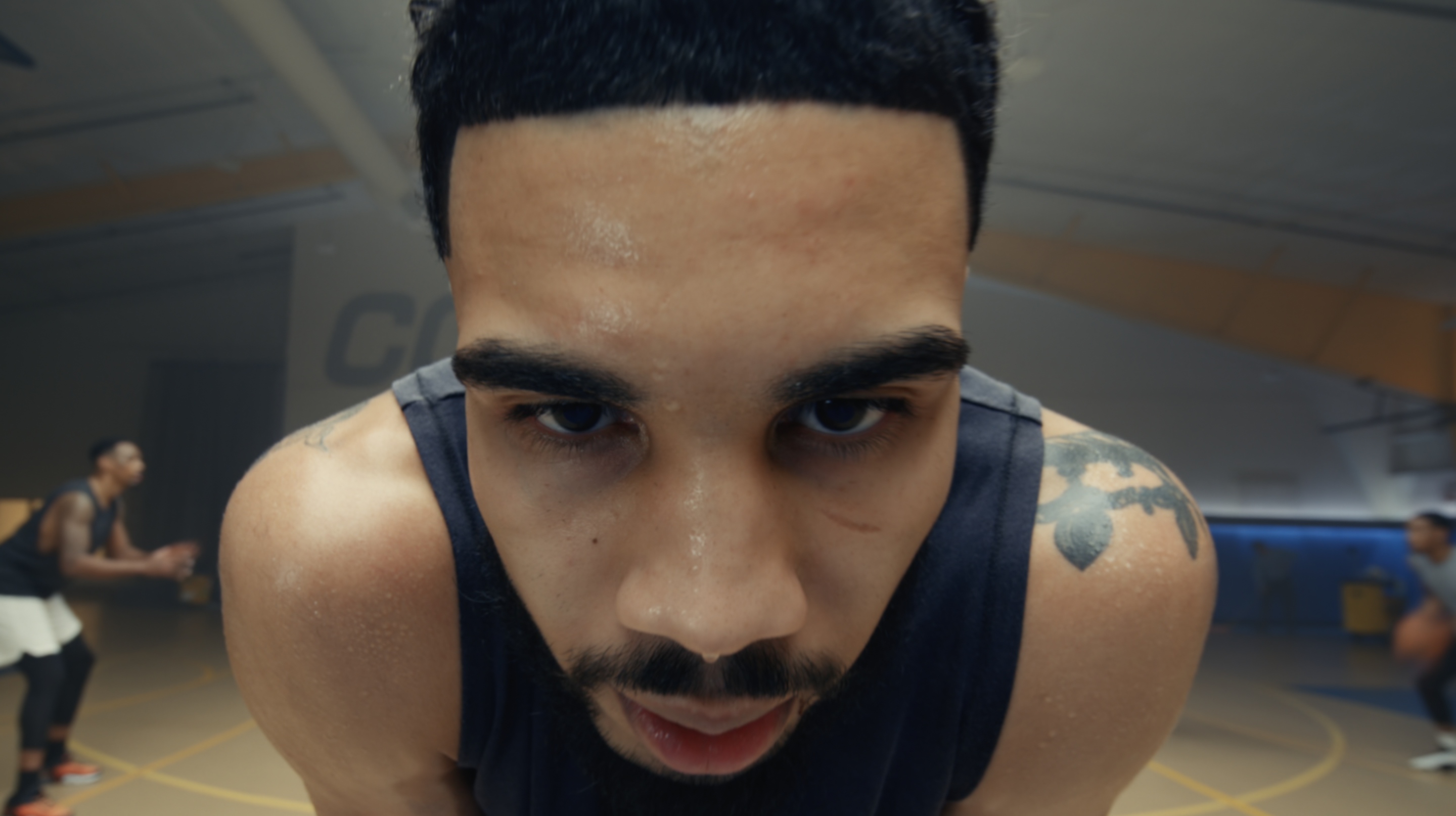
Rocky X Beats Studio Pro
Beats by Dre








Keep Pushing
The Hartford






Clap
Confused.com

Charlotte Tilbury featuring Bella Hadid
Charlotte Tilbury

Lady Khaki
Christian Louboutin

















Diablo IV | Launch Live Action Trailer
Blizzard Entertainment





Rock Climbing
Pennsylvania Lottery

More of Life Brought to Life | Sneakers
The New York Times

G.O.A.T.
Strongbow Ultra



Keep Pushing (Teaser)
The Hartford






ElectroKinetic
Mercedes-Benz


Anything
Squarespace








Jeep | Electric Slide
Super Bowl 2023

Doritos | Jack's New Angle
Super Bowl 2023

Hellmann's | Hamm & Brie
Super Bowl 2023

E-Trade | Wedding
Super Bowl 2023

Popcorners | Breaking Good
Super Bowl 2023

Kia | Binky
Super Bowl 2023

YouTube | Cat
Super Bowl 2023


California Lottery | Power B-Ball
Super Bowl 2023


Amazon | Saving Sawyer
Super Bowl 2023

Busch Light | Shelter
Super Bowl 2023

Bud Light | Hold
Super Bowl 2023

DoorDash | Chef's Groceries
Super Bowl 2023

Remy Martin | Inch by Inch
Super Bowl 2023


Football | Director's Cut
WHOLLY® GUACAMOLE

National Notes
Electoral Comittee



FDR
The History Channel

Mayhem
Allstate

Mayhem
Allstate





NASCAR
NBC Sports


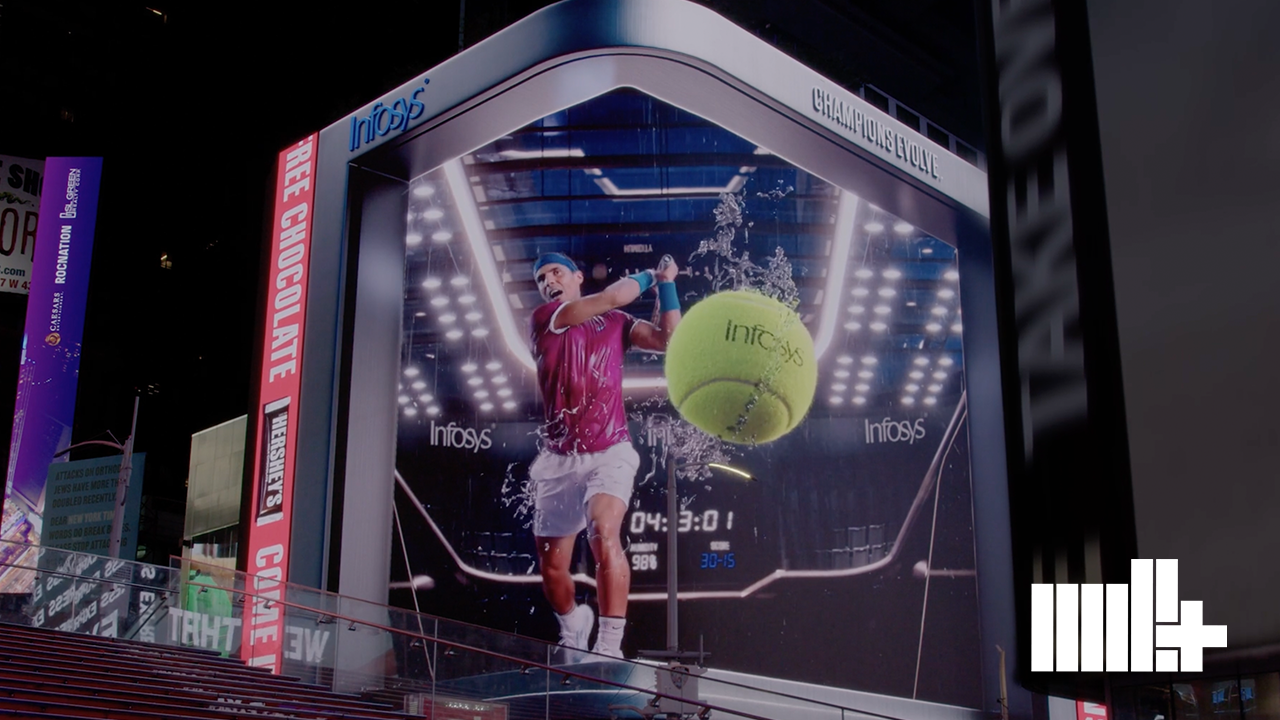
Tennis That Sees Past Gender
United Cup 2023

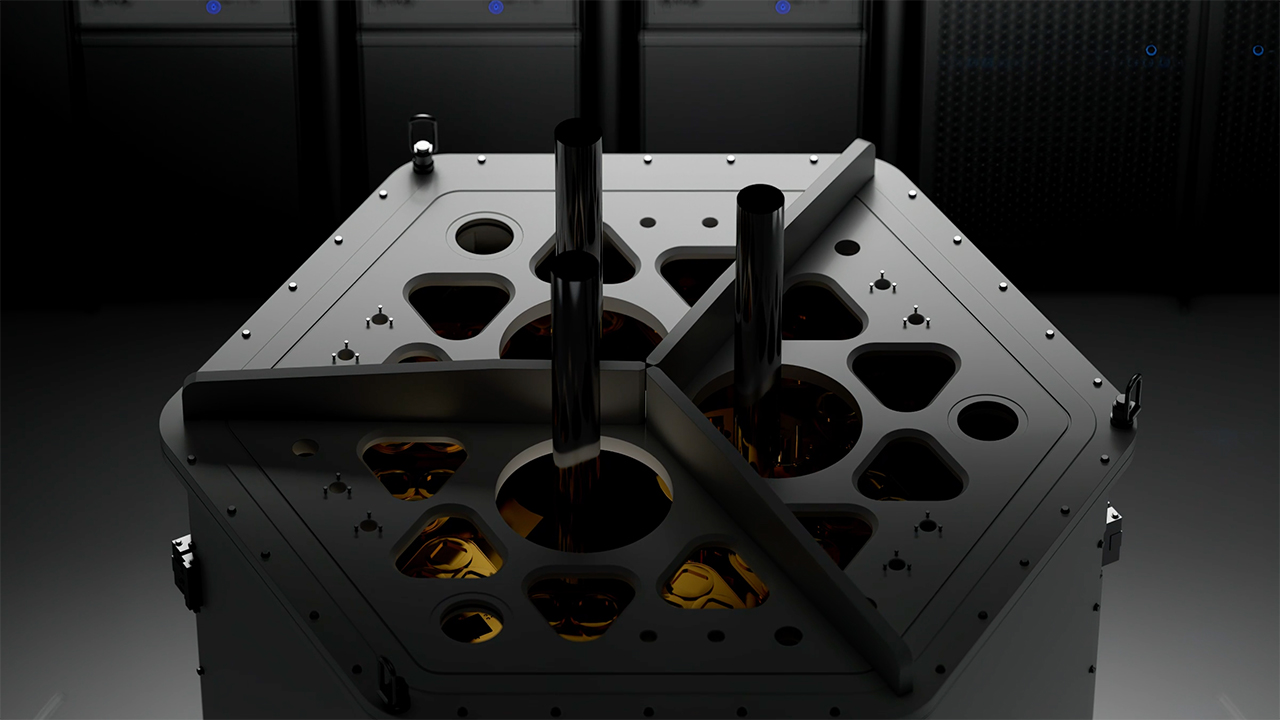
System Two
IBM Quantum

Osprey
IBM Quantum


The Sims | Pass the Spark
Electronic Arts


The March
SalesForce





Fairy & Duckie
Marks and Spencer



Taco Night
On The Rocks


LOL
Walmart






Vote Your Voice
Planned Parenthood


The Noisy Generation
British Heart Foundation


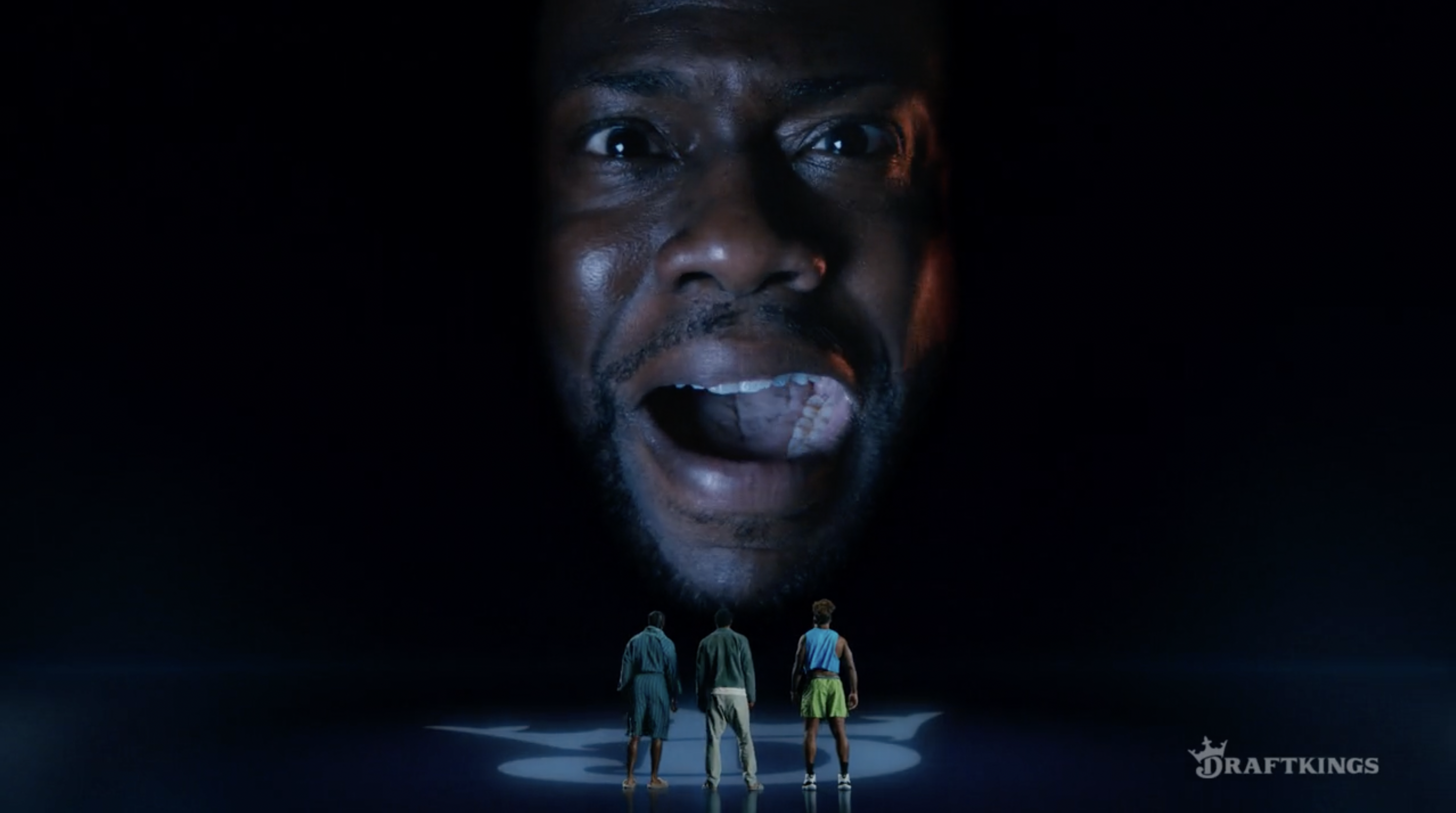
The Kevinverse
DraftKings

Look To Him
Greentea Peng




Levels to Play
Logitech G





Prepared For Life
Allianz Insurance

Scary Fast
Ford Raptor R

The Life Artois
Stella Artois

Flying Trucks
Deutsche Bahn


Night Drivers
Volkswagen Taos

Camp McDonald's
McDonald's

Usher x Remy Martin
Remy Martin

FIFA 23
EA SPORTS


Stay With Me
Calvin Harris, Justin Timberlake, Halsey, Pharrell

Clarity
TRY featuring EARTHGANG


Madden '23 Game Trailer
EA Madden NFL

Prepared For Life
Allianz Insurance



Potion
Calvin Harris, Dua Lipa, Young Thug

Anthem Film
Ancient Nutrition

Sustainability
Ancient Nutrition

SBO Probiotics
Ancient Nutrition

SBO Collagen
Ancient Nutrition

Industry X
Accenture







Dark Mode
Beats by Dre


GOAT
Strongbow


Prime
Direct Line

Cryptoblades Kingdom
Cryptoblades


Office Tour
Blue Bunny


Neighbourhood
Enterprise





DEATH STRANDING
KOJIMA PRODUCTIONS



Spring Campaign 2022
Neiman Marcus



Storm
Paramount+






Cave Paintings
Paramount+

E-Trade | Off The Grid
Super Bowl 2022

Carvana | Oversharing Mom
Super Bowl 2022

Salesforce | The New Frontier
Super Bowl 2022

Intuit QuickBooks | Duality Duets
Super Bowl 2022

Greenlight | I'll Take It
Super Bowl 2022


Squarespace | Sally's Seashells
Super Bowl 2022


Vroom | Flake The Musical
Super Bowl 2022

Amazon | Mind Reader
Super Bowl 2022

Budweiser | A Clydesdale's Journey
Super Bowl 2022

Crypto.Com | Moment of Truth
Super Bowl 2022

Michelob ULTRA | Superior Bowl
Super Bowl 2022

Strange Choices
YouTube TV



Gong.io | Gong Ho
Super Bowl 2022

Busch Beer | Voice Of The Mountains
Super Bowl 2022

Toyota Tundra | The Joneses
Super Bowl 2022

AT&T | A Lot in Common
Super Bowl 2022

Subway | The Vault
Super Bowl Fan Experience

Nissan Presents | Thrill Driver
Super Bowl 2022


Chevy | New Generation
Super Bowl 2022


Taco Bell | The Grande Escape
Super Bowl 2022

Expedia | Stuff
Super Bowl 2022

Rocket Mortgage | Dream House
Super Bowl 2022

McDonald's | CanIGetUhhhh
Super Bowl 2022


DraftKings | Fortune
Super Bowl 2022

Independent | Vera
New York Times

Independent | Jordan
New York Times


Google x NBA
Google Pixel 6

Bonfire
Paramount+

FA21 | Deltas
Nike Jordan

Walter in the Winter
Chevy Silverado

Prism
Sensorium Galaxy


Head for the Mountains
Busch Light

Imagination
Wren Kitchens




Anthem Film
Hennessy VSOP

Dazed - Elementary
Nike x ACG










Shiny Robot
YouTube Kids


Sims: Find Yourselves | Mealtime
Electronic Arts
Africa Direct
Al Jazeera




An Unlikely Friendship
Amazon Prime












Imposters
San Diego Zoo

Autumn
Carhartt
Teaser
Sea Mirror







Holiday Campaign 2021
Neiman Marcus

Rye
Elijah Craig


Brand Film
Sea Mirror
Set Yourself Free
Starling Bank


Advanced Night Repair
Estee Lauder

Come DIrect
Direct Line


Spring 2022
Edeline Lee



PSA | In the Spotlight
Stuttering Association for the Young

Easiest Decision
Capital One

Our House, Your House
Los Angeles Rams

Custom Chariot
Mercedes-Benz x Cinderella


Back On Track
National Rail



Tools
Fetch.com


Fall Campaign 2021
Neiman Marcus




Feel
Lululemon







One Up
Xfinity

Reese's Extreme
Dairy Queen


Oh Henry
Dairy Queen


Cat
Chevy Silverado








Train Body & Mind
NordicTrack

New Football
Nike Football

Valorant
Riot Games

Dungeons & Dragons: Dark Alliance | Cinematic Trailer
Wizards of the Coast

Honey Dijon
Calvin Klein


Watch Me
Ford Mustang







See Us
The Asian American Foundation

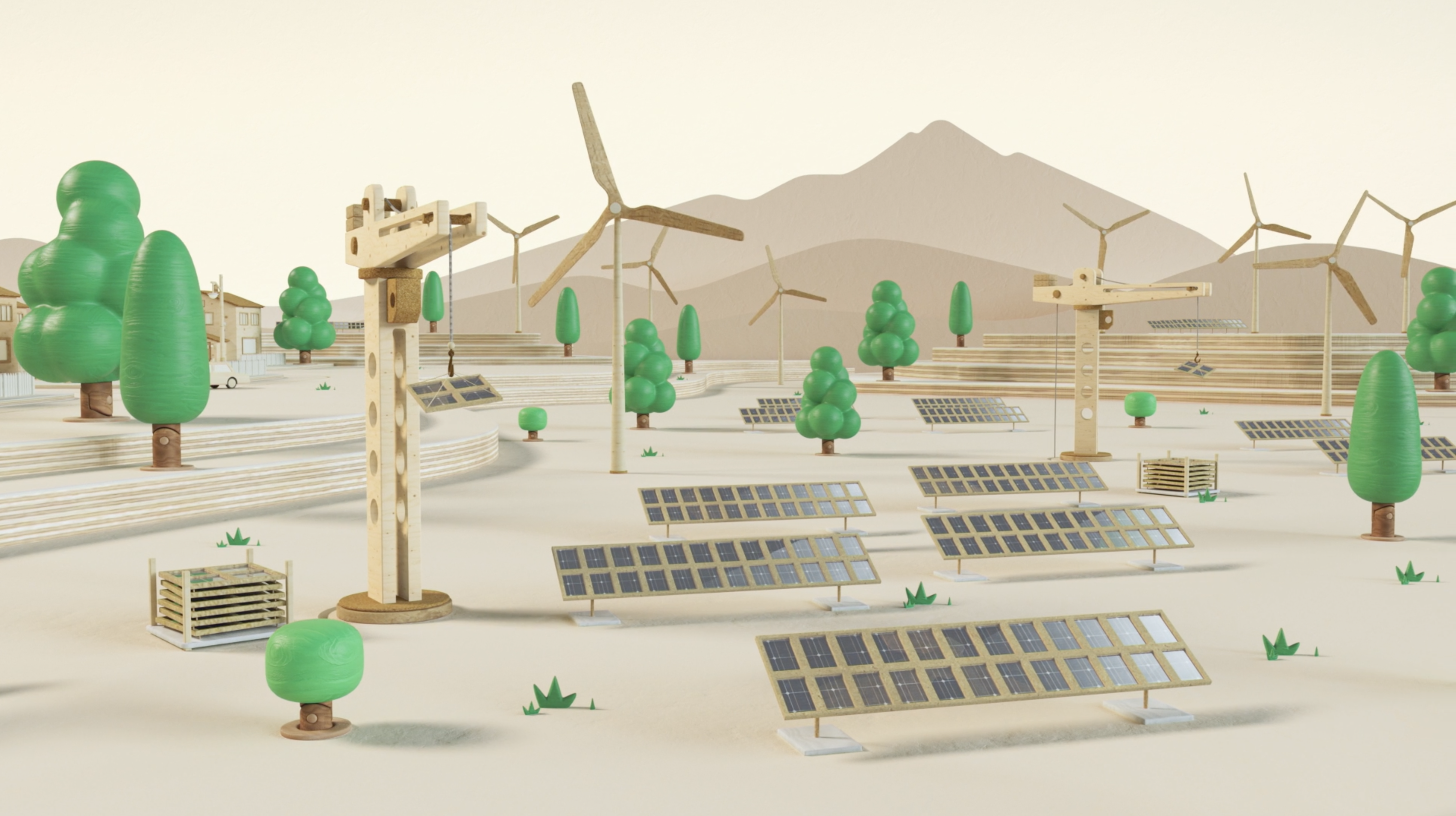
Einstein's New Lights
Smart Energy


Einstein's Race Track
Smart Energy

Einstein Loves Wind
Smart Energy
Einstein Knows Best BTS
Smart Energy